ホーム » 「IchigoJam」タグがついた投稿
タグアーカイブ: IchigoJam
最近の投稿
- 固定電話の解約2026-05-10固定電話を解約した。 […]
- HomeAssistant のオートメーション2026-05-10スマホの Ping(ICMP) の binary_sensor […]
 バイブコーディングによる越前焼の試作システム2026-05-08ジュニアドクターにて越前焼の試作システムを作りたい […]
バイブコーディングによる越前焼の試作システム2026-05-08ジュニアドクターにて越前焼の試作システムを作りたい […] Homebridge2 はまだ早い?2026-05-08homebridge2.0 が正式リリース Homebridge の最新の homebridge2.0 […]
Homebridge2 はまだ早い?2026-05-08homebridge2.0 が正式リリース Homebridge の最新の homebridge2.0 […] 高岡、氷見家族旅行2026-05-06家族4人で富山旅行。砺波のチューリップフェアと、氷見漁港に行きました。 […]
高岡、氷見家族旅行2026-05-06家族4人で富山旅行。砺波のチューリップフェアと、氷見漁港に行きました。 […]
FOLO robot
以前に参加した蟹ロボコンの講習会で実験用にもらった MapleSyrup と FOROを、IchigoJamで動くようにしてみた。
接続とマウント
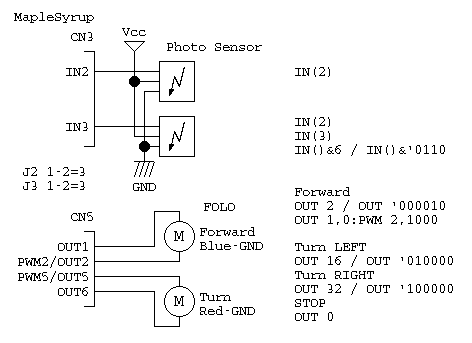
接続は、こんな感じ。
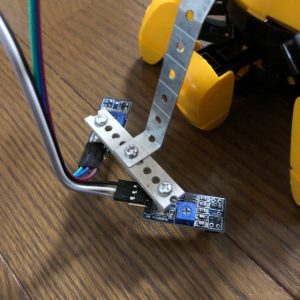
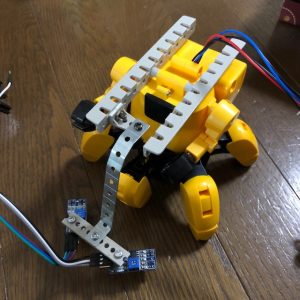
ライントレース用のセンサーの取り付け。Rasbee TCRT5000 IR反射センサ
 最初の取り付け版(金属プレートの入手が難しい)
最初の取り付け版(金属プレートの入手が難しい)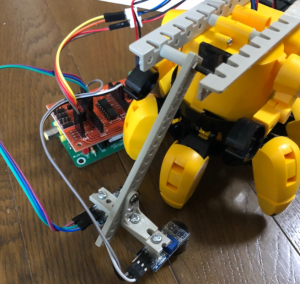
タミヤ 楽しい工作シリーズ No.157 の軸受部を FOLO 頭部接続部に穴を開けて、長めのシャフトで固定。
IchigoJam は、軸受の穴に結束バンドで固定。軸受の上面に両面テープを貼り、電池ボックスを固定。
ライントレース
10 'FOLO robot | 腰モータが速くて失敗 20 A=IN()&6 | IN(3),IN(2)だけ残す 30 IF A=6 THEN B=2 | 黒黒→直進 40 IF A=4 THEN B=2+16 | 黒白→左直進 50 IF A=2 THEN B=2+32 | 白黒→右直進 60 IF A=0 THEN B=0 | 白白→停止 70 OUT B : WAIT 10 | 出力, 待ち 80 GOTO 20
問題点
足を歩行させる動きの効率の悪さから直進速度が遅いのに比べ、腰(足)を回転させる動きが速いので、すぐに(白,白)領域にセンサーが入って止まってしまう、もしくは境界で曲がりすぎる。
腰の動きを遅くしたいけど、OUT5はPWM命令を使えばモータの速度を落とせるけど、OUT6はPWM命令が使えない。ソフトウェア的に対応が必要。
改良版
10 'FOLO robot 20 A=IN()&6 : B=0 | IN(3),IN(2)だけ残す 30 IF A=4 THEN B=2+16 | 黒白→左直進 40 IF A=2 THEN B=2+32 | 白黒→右直進 50 IF A=6 THEN B=2 | 黒黒→直進 60 OUT B : WAIT 1 70 B=B&3 | 方向回転モータは止める 80 OUT B : WAIT 4 | 出力, 待ち 90 GOTO 20
- ライントレース動作になるためには、前進速度と曲がる速度を調整し、60行 WAIT 1 / 80行 WAIT 4(腰モータのデューティー比(約20%)が良かったかな。(前進はフルスピード設定)
- 反射型光センサーは赤外線は反射・透過性が高いので、コースをコピー用紙にプリンタで黒印刷だと、プリンタの黒を認識しづらい。以下の動画では床板(黒)とコピー用紙(白)の境界で走行。
- センサーが微妙なので、センサー周りに内側黒塗りの遮光カバーを付けている。(効果は不明)
- FOLOは座高が高いため、歩行動作では体の揺れが大きい。このためセンサー・床間の距離が安定しにくい。光センサーをアナログ命令ANA()で取得しても、閾値設定が難しい。
PCN福井さんの車体では、センサーを床で滑らせて距離を一定に保つことを考えているみたい。