ホーム » T-Saitoh (ページ 100)
「T-Saitoh」カテゴリーアーカイブ
最近の投稿
- Geminiで朝のお天気報告2026-07-09お遊びで、朝の起床にあわせて、Gemini […]
- chronyからntpd-rsに変更&断念2026-07-05タイムサーバーを ntpsec から chrony に変更したけど、最近は Rust で作られた […]
- ケーブルテレビの Super Drama TV が終わる2026-06-27利用しているケーブルテレビだけど、海外ドラマとか好きだったのでよく見ていた“Super […]
 PC9801RX,EPSON-PC2862026-06-23職場の改修工事に備え、部屋の跡片付け中、古い古い書類の下から、スペーサー状態のNEC-PC9801 […]
PC9801RX,EPSON-PC2862026-06-23職場の改修工事に備え、部屋の跡片付け中、古い古い書類の下から、スペーサー状態のNEC-PC9801 […]- ベトナムの接続許可2026-06-23インターンシップ引率でベトナム行き… […]
iOS12でインターネット共有ボタンが押せない
バグだな。IOS12のインターネット共有の画面、検索バーが表示されて、共有On/Offボタンを隠してしまい、触れない。検索バーどうやって消すの?
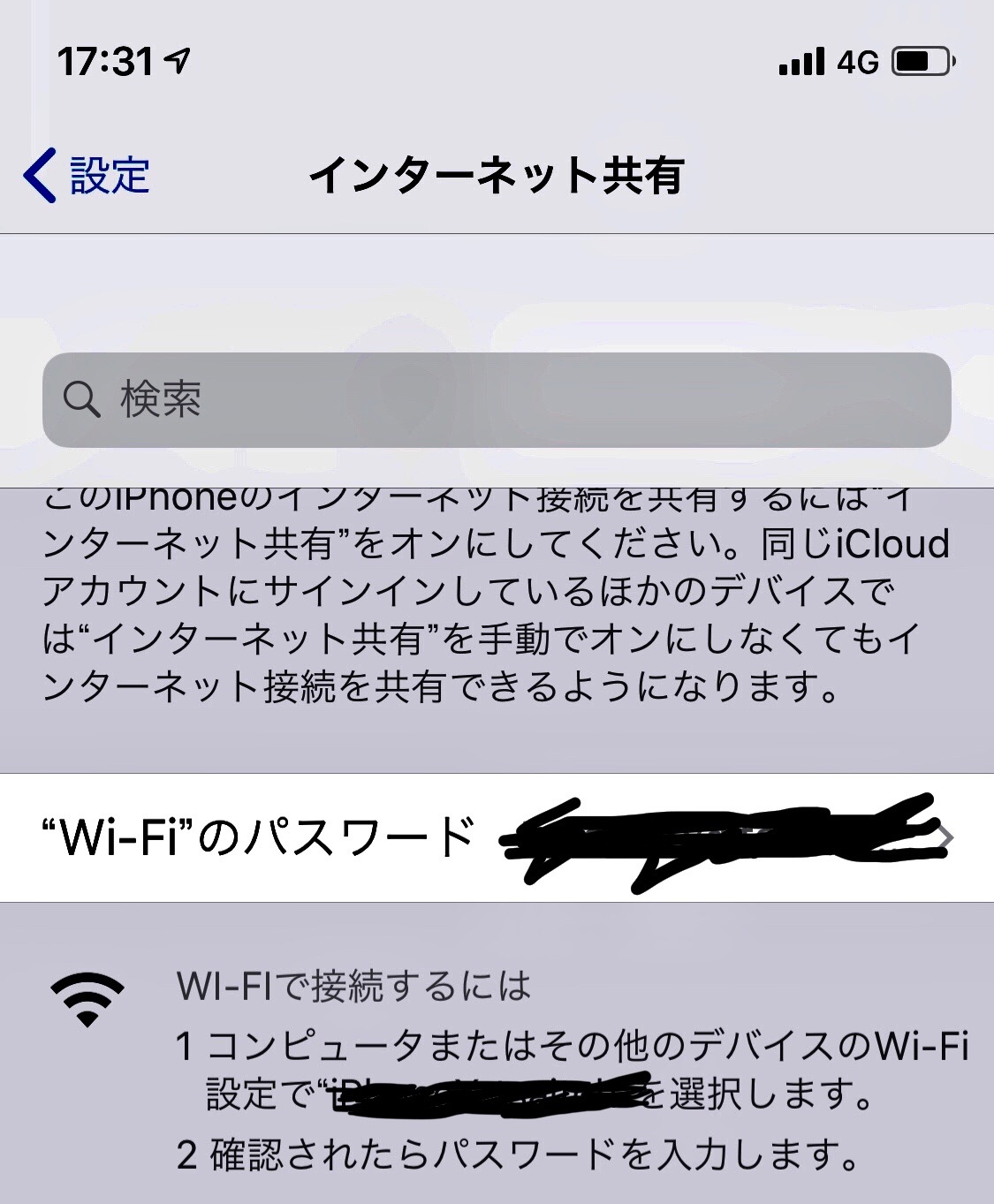
((追記))
ひとまず、再起動すれば、もとに戻った。
 みぃ〜
みぃ〜 ママ
ママ あ〜
あ〜 パパ
パパiOS12,WatchOS5インストール
夜中に目が覚めてインストール開始。起きて使ってみたけど、よく使う部分では変わりないな。
でも、操作が軽くなったように思う。
mineo 宛のメールを取り込む
子供の携帯は、mineo を使っているけど、子供の契約変更(auプラン→docomoプラン)の時に、子供のmineo メール宛に送られている確認メールに気づくのが遅れ、手間取った。
子供の mineo メールのアカウントで、転送設定すればいい…と思ったけど、mineo メールにはそんな機能は無いらしい。gmail で mineo のメールを取り込む方法もあるけど、基本は本人任せで契約変更をしたい時だけメールを確認するのなら、自宅のメールサーバに読み込むほうが手っ取り早そう。
そこで、自宅メールサーバで、mineo.jp のメールを取り込む .fetchmailrc を書き、crontab で fetchmail を実行するように設定した。
EdgeRouter-X で ssh 公開キーの登録
CUIで登録する方法
EdgeRouter-X で ConfigTree で設定できる項目は増えていて、WebUI で登録できそうなんだけど、失敗するので、CUI で登録する。
((接続元)) $ cat ~/.ssh/id_pub.rsa
ssh-rsa XXX….XXXX xxxx@server
((EdgeRouter))
$ configure
# set system login user xxxx
authentication public-keys
xxxx@server
type
ssh-rsa
# set system login user xxxx
authentication public-keys
xxxx@server
key
XXX….XXXX
# commit # save # exit
WebUIで登録する方法
設定ができた後だと、ConfigTree に設定内容が反映されて、WebUI での正しい設定のやり方が分かった。


WCR-1166DSを導入
色々と1FでのWiFi環境の整えるなか、先日は2FWiFiルータにレフ板を設置して、かなり改善したけど、ママが「台所で使えん!」とのクレーム。レフ板の方向からすると、1F居間が限界。ということで、親のエアコン更新した時のポイントが残っていたので、WCR-1166DS を買ってきた。Buffalo だから相性はいいだろう。

1F 駐車場 台所|居間|玄関|寝室 ーー+ーー+ーー+ーー 風呂| 座敷 | 座敷 2F |子供|子供| +ーー+ーー+ | 居室 | (WiFi)


@TohruSaitoh-18/09/08
![]()
- 09/08 @hftorisan すみません、端末側のことしか考えてませんでした。店側のトランザクション….都度発行?まとめて発行?…都度発行なんだろうなぁ….。
 [元記事]
[元記事] - 09/08 @hftorisan Felica系電子マネーは、カードのお金データを減った値に書き換えですね。でも、クレジットから電子マネーのチャージとかはネットワークなかったら不可能…ってことかと思います。 [元記事]
- 09/06 RT @jcn92977110: 朝日新聞検索逃れメタタグ、日本語の挺身隊との混同記事にまだ残っていた!しかしWayback Machineで見ると2014年8月5日公開時には入ってない。どうやら2017年9月10日以降に挿入されたらしい。公開時の作業漏れで説明できるのか?しか…
- 09/04 台風の風で家揺れてますがな…
北海道停電
- 09/08 今回の #北海道停電 は、電力の需要供給バランスが崩れたのが原因。これと同じことは、 #東北大震災 の #アンチ原発 の流れで、発電能力が不足している東京では、 #異常気象 で #エアコンフル稼働 時に発生してもおかしくない。その… https://twitter.com/i/web/status/1038205…
情報構造論
- 09/04 ソート・アルゴリズムの計算量を答えよ。 #情報構造論 https://twitter.com/mofnekoclub/status/1…
この記事は
メールの日本語化
自宅で動かしている様々な機能で、警告メールを送信することも多いけど、基本英字。日本語でも文字コードが utf-8 なら、mail コマンドで送ることもできるけど、日本語の定番のJISコードで送りたい。そこで、Subject をMIMEエンコード、本文をJISコードで送るスクリプトを設置。
#!/bin/bash
# 日本語のメールを送る(SubjectのMIME化,本文のJIS,Content-Type出力)
# Usage: mail-jp -s SUBJECT -r FROM TO_ADDR ...
SUBJECT=""
FROM=""
TO=""
( # オプション(subject,from)引数処理
while [ $# -gt 0 ]; do
case $1 in
'-s' )
SUBJECT=$2
shift
;;
'-r' )
FROM=$2
shift
;;
* )
# レシビの出力
[ -n "$FROM" ] && echo "From: $FROM"
[ -n "$SUBJECT" ] \
&& echo "Subject: $SUBJECT" | /usr/bin/nkf -M
echo 'Content-Type: text/plain charset="iso-2022-jp"'
echo 'Content-Transfer-Encoding: 7bit'
break
;;
esac
shift
done
# 引数(to:メールアドレス)
while [ $# -gt 0 ]; do
echo "To: $1"
shift
done
echo ""
# 本文
/usr/bin/nkf -j
) | /usr/sbin/sendmail -t
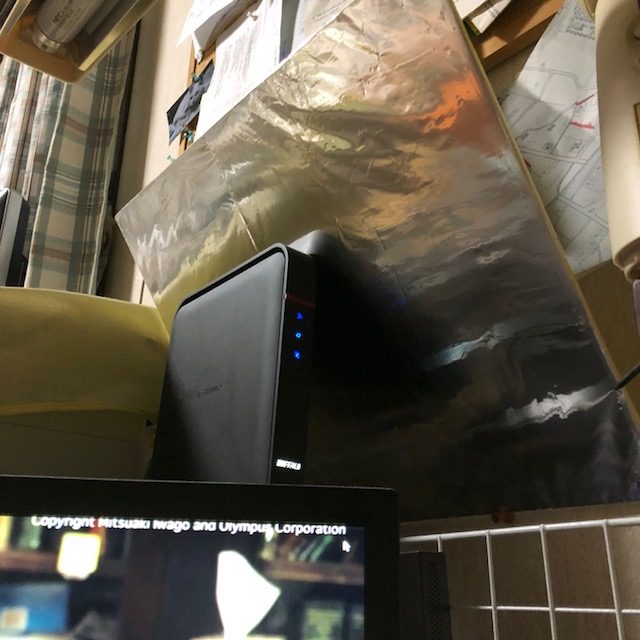
WiFiレフ板
写真撮影用のレフ板ではありません。(^^;
2Fに設置してあるWiFiルータを補助するために、WiFi中継機 wex733d を設置してたけど、あまりにも動作が不安定なのできっぱり諦めた。代わりに、無線LAN電波を反射させるレフ板を作ってみた。手元にあった薄いスチロール板にアルミホイルを貼っただけ。
最初、WiFiの後ろの壁にそのまま立てかけたけど、効果も出て 1F居間 でもつながるようになった。しかしさらに外の駐車場(車のナビのWiFi)では、接続不可能だった。そこで、1Fに電波が飛ぶように、レフ板を下向きに倒してみた。これにより、外の駐車場でもかろうじて電波が取れるようになった。